江苏科技大学电子信息学院,江苏 镇江 212003
无人机与无人艇组成空水作业系统,可以大幅度提高系统完成作业的能力和效率,因此对旋翼无人机在运动无人艇上自主降落控制进行了研究。无人机基于通信获取的无人艇的运动信息和自身的GPS信息,配合视觉算法对降落标识进行识别和定位的计算结果信息实现对无人艇的位置跟踪。无人机根据获取的无人艇的姿态信息进行姿态跟踪后保持对无人艇的位置姿态跟踪并执行无人机自主降落操作。搭建了四旋翼无人机和无人艇组成的空水系统进行实验,结果表明,该系统能够可靠地完成无人机自主降落过程中各个阶段的任务,验证了系统的可行性。
自主降落 旋翼无人机 运动控制 视觉引导 autonomous landing rotor drone motion control visual guidance
Author Affiliations
Abstract
1 State Key Laboratory of Quantum Optics and Quantum Optics Devices, Institute of Laser Spectroscopy, Shanxi University, Taiyuan 030006, China
2 Collaborative Innovation Center of Extreme Optics, Shanxi University, Taiyuan 030006, China
3 College of Physics and Electronics Engineering, Shanxi University, Taiyuan 030006, China
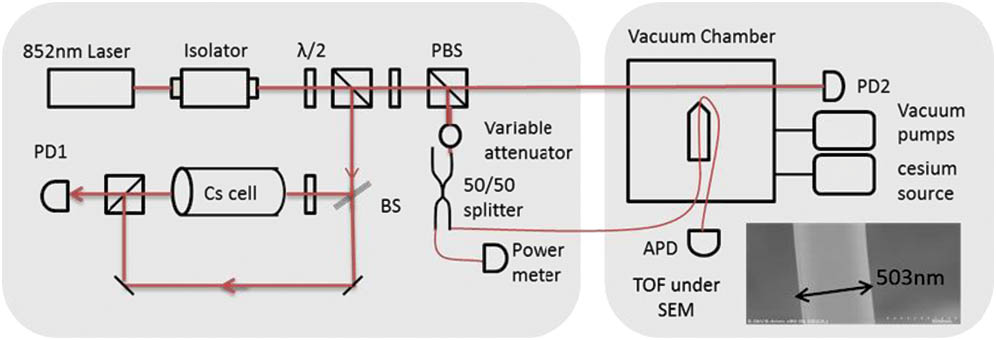
We report the observation of ultralow-power absorption saturation in a tapered optical fiber (TOF) mounted in a hot cesium (Cs) vapor in a vacuum chamber. The small optical mode area of TOF produces a great influence on optical properties, allowing optical interactions with nanowatt-level power. The comparison of transmission characteristics for the TOF system and free-space vapor is investigated at different input power and atomic density. The unique performance of the Cs-TOF system makes it a promising candidate in resonant nonlinear optical applications with ultralow power.
190.4360 Nonlinear optics, devices 300.6210 Spectroscopy, atomic Chinese Optics Letters
2019, 17(3): 031901









